- Thread starter
- #61
I follow you...Imagine a plate sitting on a table. That is your antenna dish. Now imagine there's a small depression in the exact center of the plate in which the point of a tall slender top is spinning. Gyroscopic rigidity in space keeps the top perpendicular to the plate. That is your rotating feedhorn.
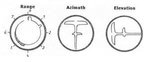
So the higher the error-signal, the more the antenna adjusts until there is none?Now imagine you can suspend the laws of physics enough to pick up this plate/spinning top assembly and bolt it into an articulated gimbal structure on the front end of your aircraft. This gimbal has powerful little motors that drive the dish left-right-up-a-notch, left-right-up-a-notch, and so forth until it reaches the upper gimbal limit, then repeats the process down to the lower limit and back to level. Since a feedhorn isn't as symmetrical as a top, the beam it projects from the dish at any point in its rotation is not symmetrical around the central axis of the dish. Rotation of the feedhorn causes this asymmetrical beam to form a very slender cone of signal centered on the axis of the dish, strongest on axis and weaker towards the edges. This oprovides the signal strength comparisons that generate the "pointing error" signals used to drive the antenna to put its axis "on target". Once the antenna is "on target", the azimuth and elevation are known and return time provides range.
This looks a lot like triangulation, but Token mentioned something about measuring errors through amplitude and phase changes (which I assume to be constructive/destructive interference effects).